

 联系我们
联系我们


进入今日正题:库卡机械臂中的RDC作用与接口功能
1、它有何作用:
(1)提供电压,具备电源分配功能
(2)借用分解器(SIL2)技术采集八个电机的位置信息,进行位置反馈
(3)获取电机实时的温度(PTC)
(4)自身也具备自我温度反馈,增设热敏电子元件
(5)与控制器主机大脑中MFC-DSE功能数据采集卡进行数据交互
(6)在线诊断分解器闭环的电路是否中断
(7)评估 EMD 或者EMT,数据保存,存储到EDS(电子数据存储器)。
另外,利用两个 FPGA(现场可编程门阵列)可进行安全的双通道式分解器评估和分解器数据分析处理。类似ABB的安全链,ABB里面的主要靠逻辑门实现,而库卡这个是靠电子元件触发,有些差异,FPGA就是个定制化电路芯片,与单片机有些差异,这个主要是以并行运算为主。
如果两个 FPGA 的任务相同,进行数据对比,然后检测对比结果。两个 FPGA 数据一致时,与控制系统之间正常通讯。反之,EtherCAT就会中断报错。
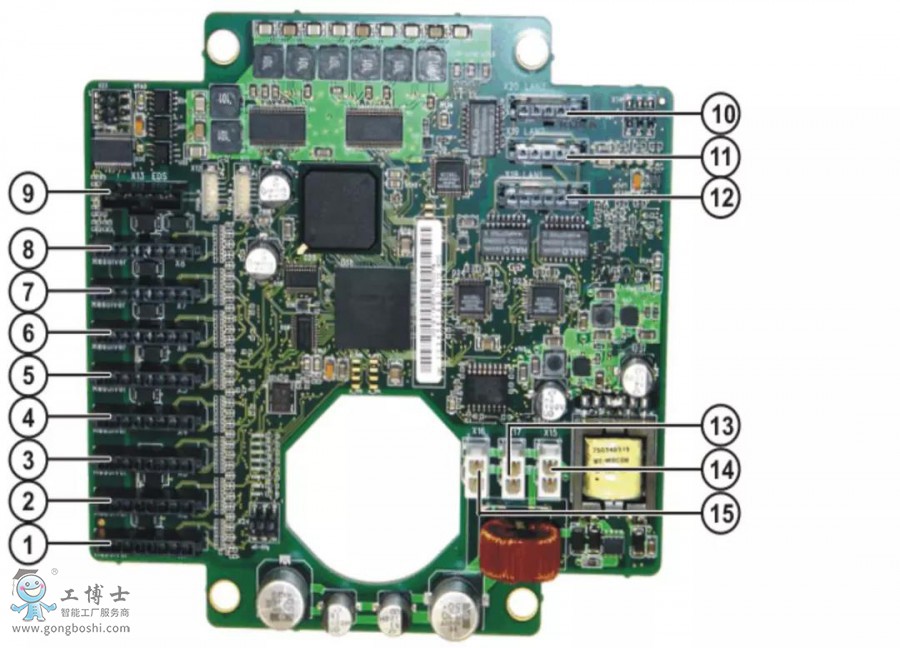
2、RDC接口功能说明
|
序号 |
插头 |
说明 |
|
1—8 |
X1—X8 |
1至8号轴的分解器接口 |
|
9 |
X13 |
RDC储存卡的EDS接口 |
|
10 |
X20 |
EMD |
|
11 |
X19 |
KCB OUT |
|
12 |
X18 |
KCB IN |
|
13 |
X17 |
EMD供电电源 |
|
14 |
X15 |
供电电源IN |
|
15 |
X16 |
电源OUT(下一个KCB用户) |
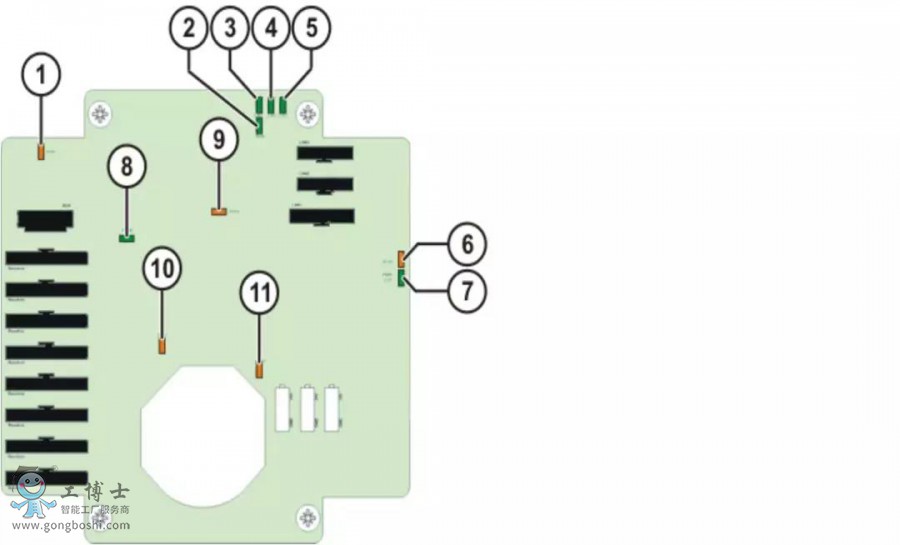
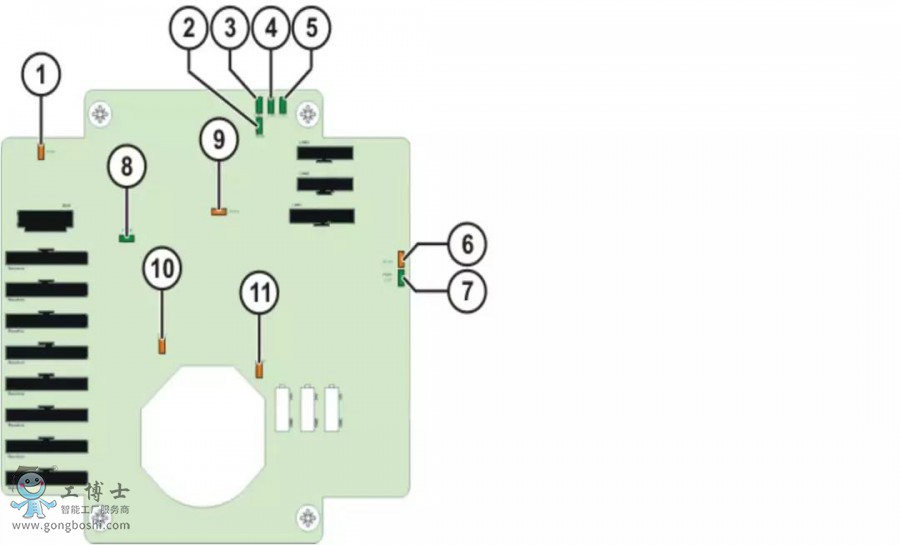
3、RDC电路板卡LED状态
|
序号 |
名称 |
标色 |
说明 |
|
1 |
微控制器的电机温度 |
黄色 |
关闭 = 故障 以 1 Hz 闪烁 = 状态正常 闪烁 = 错误代码(内部) |
|
2 |
RUN(运行) EthetCAT总线 |
绿色 |
关 = 初始化 接通 = 状态正常 以 2.5 Hz 闪烁 = 试运转 单一信号 = 安全运转 闪烁 = 错误代码(内部) 以 10 Hz 闪烁 = 启动 |
|
3 |
KCB输入端(X18) |
绿色 |
关 = 无物理连接。网线无法插好。 打开 = 网线已插入 闪烁 = 线路上数据交换 |
|
4 |
KCB输出端(X19) |
绿色 |
关 = 无物理连接。网线无法插好。 打开 = 网线已插入 闪烁 = 线路上数据交换 |
|
5 |
连接EMD的KCB输出端(X20) |
绿色 |
关 = 无物理连接。网线无法插好。 打开 = 网线已插入 闪烁 = 线路上数据交换 |
|
序号 |
名称 |
标色 |
说明 |
|
6 |
VMT微型控制器 |
黄色 |
关闭 = 故障 以 1 Hz 闪烁 = 状态正常 闪烁 = 错误代码(内部) |
|
7 |
RDC电源 |
绿色 |
关 = 无电压 开 = 有供电电压 |
|
8 |
EtherCAT连接的安全协议 |
绿色 |
关 = 未激活 开 = 功能就绪 闪烁 = 错误代码(内部) |
|
9 |
FPGA B集成电路 |
黄色 |
关闭 = 故障 以 1 Hz 闪烁 = 状态正常 闪烁 = 错误代码(内部) |
|
10 |
FPGA A集成电路
|
黄色 |
关闭 = 故障 以 1 Hz 闪烁 = 状态正常 闪烁 = 错误代码(内部) |
|
11 |
配置微型控制器 |
黄色 |
关闭 = 故障 以 1 Hz 闪烁 = 状态正常 闪烁 = 错误代码(内部) |
功能总体来说和早期的RDW类似,但更加趋向于硬件状态数据获取,数据处理速度上。
了解更多库卡机器人产品:http://kuka.gongboshi.com
