
important; overflow-wrap: break-word !important;"> 1、DH参数怎么来的(首先是两兄弟一起研发的,做了一个通用的表示机械臂的数学模型表示方法)
important; overflow-wrap: break-word !important;"> 在1955年,Denavit和Hartenberg在“ASME Journal of Applied Mechanics”发表了一篇论文,后来利用这篇论文来对机器人进行表示和建模,并导出了它们的运动方程,这已成为表示机器人和对机器人运动进行建模的标准方法,所以必须学习这部分内容。Denavit-Hartenberg(D-H)模型表示了对机器人连杆和关节进行建模的一种非常简单的方法,可用于任何机器人构型,而不管机器人的结构顺序和复杂程度如何。它也可用于表示已经讨论过的在任何坐标中的变换,例如直角坐标、圆柱坐标、球坐标、欧拉角坐标及RPY坐标等。另外,它也可以用于表示全旋转的链式机器人、SCARA机器人或任何可能的关节和连杆组合。尽管采用前面的方法对机器人直接建模会更快、更直接,但D-H表示法有其附加的好处,使用它已经开发了许多技术,例如,雅克比矩阵计算和力分析等。
important; overflow-wrap: break-word !important;"> 2、DH参数作用
important; overflow-wrap: break-word !important;"> 作用就是一种通用机械臂数据模型的表示方法。不同的机械臂类型其数据变量肯定是不一样的。
important; overflow-wrap: break-word !important;">
important; overflow-wrap: break-word !important;"> 工业机器人由一系列关节和连杆组成。大部分采用串联结构方式。这些关节可能是滑动(线性)的或旋转(转动)的,它们可以按任意的顺序放置并处于任意的平面。连杆也可以是任意的长度(包括零),它可能被弯曲或扭曲,也可能位于任意平面上。因此任何一组关节和连杆都可以构成一个我们想要建模类型机械臂。两兄弟合力形成了一个数学公式叫做总变换矩阵。也就是齐次坐标和齐次变换。关于这个坐标变换与推算的过程有兴趣的朋友变可以去针对性学习。
important; overflow-wrap: break-word !important;"> D-H矩阵由4大部分组成,分别有R-旋转矩阵,P-位置矩阵,O-透视矩阵,I-比例变换。
important; overflow-wrap: break-word !important;"> 总变换矩阵用4×4的齐次变换矩阵来描述相邻两连杆的空间关系。通过依次变换可*终推导出相对于基坐标系的位姿,从而建立机器人的运动学方程。
important; overflow-wrap: break-word !important;">
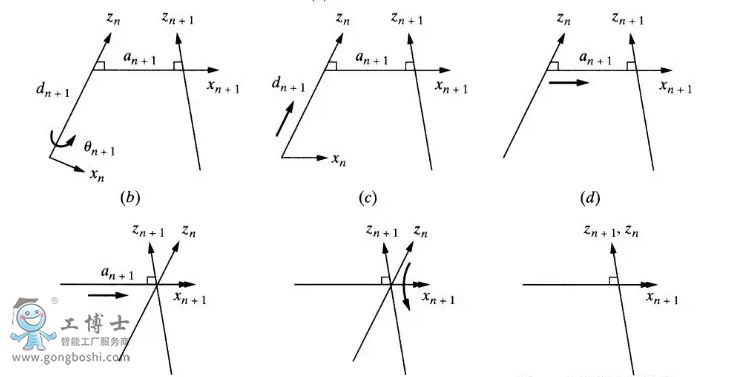
important; overflow-wrap: break-word !important;"> 总变化矩阵就是从**个关节到第二个关节,一直到第*后一个关节确定坐标系和变换坐标系的过程。如何实现任意两个相邻坐标系之间的变换,这个公式就很重要了,无论是设计还是衍生算法都做出了巨大贡献。
important; overflow-wrap: break-word !important;">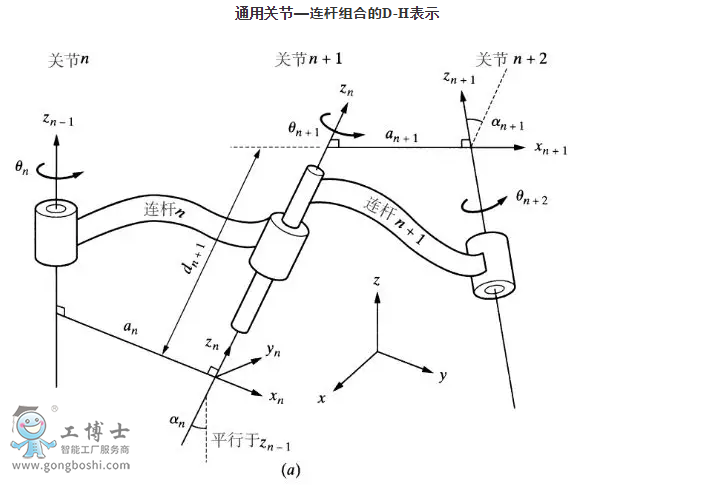
文章转载为微信公账号侵权删
了解更多库卡机器人相关信息请访问:http://kuka.gongboshi.com


 联系我们
联系我们
 产品分类
产品分类