

 联系我们
联系我们

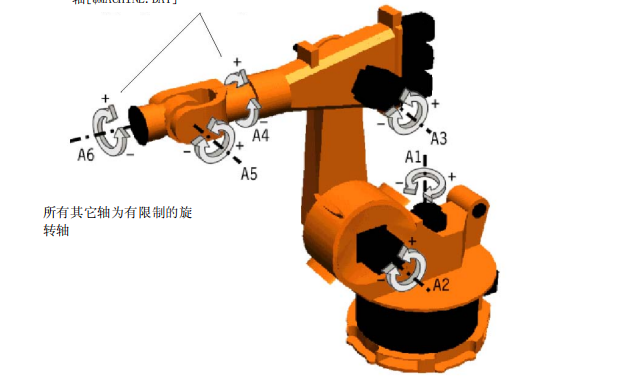
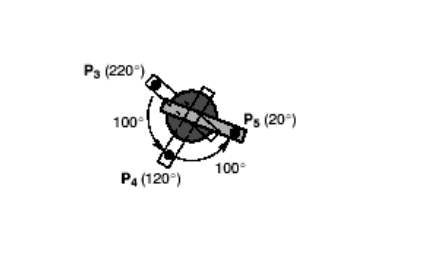
如果修改机器数据来定义坐标轴A4和/或A6作为无限制的旋转坐标轴,请小心进行沿着*短路径执行的各个旋转。 如果具有提供路线(例如,焊枪)的刀具安装在库卡机器人上可能引起问题。A4 和 A6 也可以定义为无限制的旋转轴[$MACHINE.DAT] 所有其它轴为有限制的旋转轴在下面的例子中,编程两个运动指令(P1--P2和P2--P3)并且保存坐标。请参考以下草图。 这个例子中**个运动指令引起轴A6 从P1(0°)到P2旋转120°。第二个运动 指令旋转A6从P2(120°)到P3(220°) 再旋转100°

第三个运动指令用于从P2到P3相反的方 向移动刀具200°,即从开始位置P1算起 的20°位置。当执行程序时,然而坐标轴A6将从P3(220°)到P4(380°)沿着*短路径旋转,正好是160°

这将不可避免导致从库卡机器人到绕过关节被绕的刀 具任何提供的路线。 因此对于第二个(返回)运动有必要分离为两个运动指令 在这个例子中,已编程的两个运动(P3-P4和P4-P5)每个 旋转100°的角度。这将保证执行程序时刀具按正确的方向 移动到终点。
这里,库卡机器人系统在两点之间使用*快的路线定位。由于坐标轴运动开始和结束要同时进行,坐标轴得同步。因此库卡机器人不能走的路径要预先知道。 当使用指令时,运动按照通过机器人定义的路径执行。为了考虑动态效果和避免碰撞,开始按小的程序倍率(POV)执行路径。 点的名字不可以以“POINT”开头,由于这是个关键字。 具有准确定位的PTP运动 在具有准确定位的PTP运动的情况下,机器人准确地停止在各个终点。

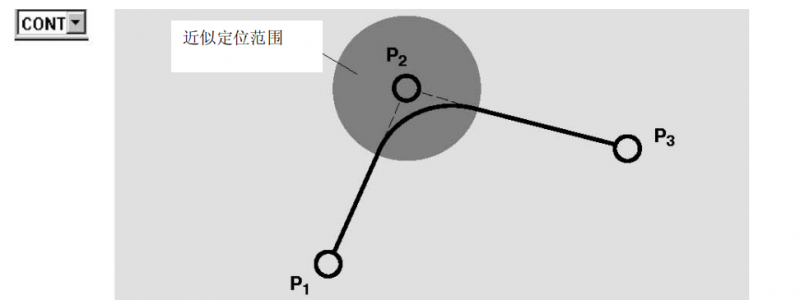
库卡机器人具有近似定位的PTP运动
在近似定位期间,控制器监控终点的近似定位范围。在例子中,是点P2。当TCP进入这个区域,机器人运动立即朝向下一个运动指令的终点执行
了解更多库卡机器人信息:http://kuka.gongboshi.com
- 下一篇:被美的集团收购后库卡机器人收入大增
- 上一篇:库卡机器人营收利润双跌原因究竟何在?
