您好!欢迎光临
工博士商城
库卡机器人专营
产品:62
联系我们
网站首页
供应产品
新闻中心
联系方式
品牌故事
您当前的位置:
首页
»
新闻中心
» 库卡机器人编程—子函数的数据传递——KUKA krC4控制柜
产品分类
全部分类
库卡工业机器人
搬运、码垛机器人
铸锻机器人
弧焊机器人
LBR iiwa机器人
小型机器人技术
低负荷机器人(6kg~20kg)
中等负荷机器人(30kg~60kg)
高负荷机器人(90kg~300kg)
重载机器人(300kg~1300kg)
库卡控制系统
KUKA smartPAD
KR C4
KR C4 compact
KUKA Sunrise Cabinet
机器人导轨
机器人变位机
铸造版L型
铸造版U型
焊接版L型
焊接版U型
焊接版H型(单轴)
焊接版U型(首位可调节式)
焊接版O型(单轴水平旋转)
焊接版U型-2 轻型倾斜翻转双轴
焊接版H型-2 (垂直翻转三轴)
焊接版U型-3 (中型倾斜翻转双
焊接版L型-2 (重型倾斜翻转双
新闻中心
库卡机器人编程—子函数的数据传递——KUKA krC4控制柜
发布时间:2019-10-28 浏览次数:994
返回列表
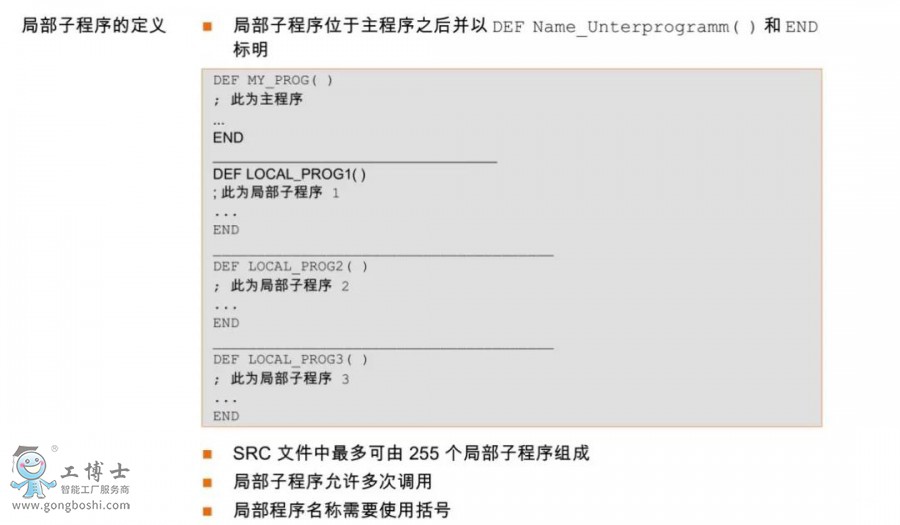
1.局部子程序的定义
2.创建全局子程序步骤
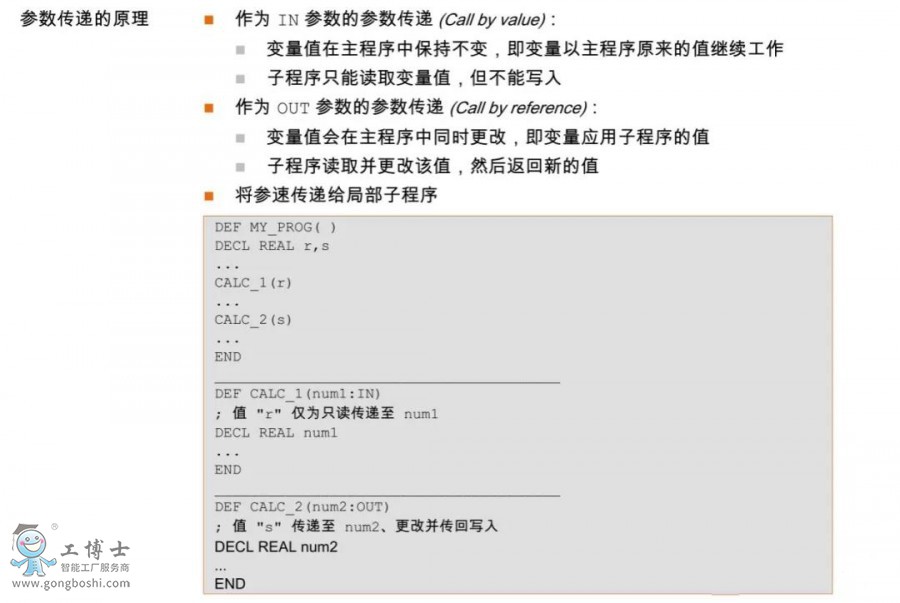
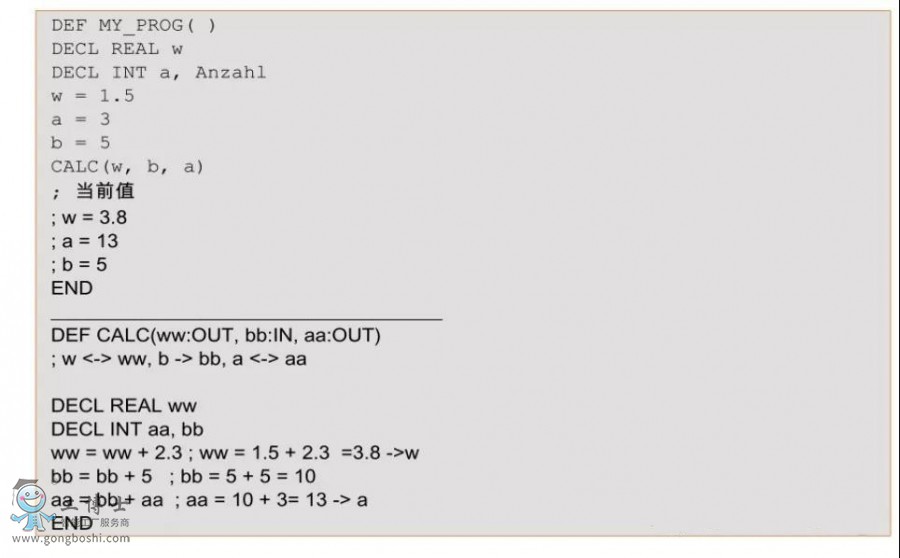
3.如何将变量数据传递到子程序呢?
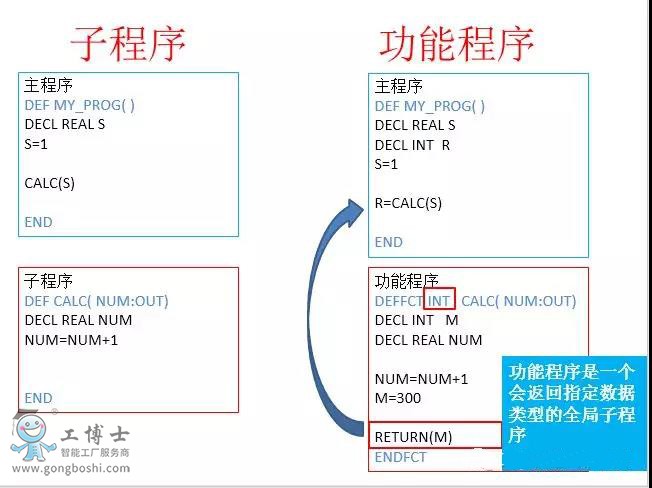
4.建立函数传递子程序
5. 功能程序与子程序结构
了解更多
库卡机器人
相关信息请访问:
http://kuka.gongboshi.com
下一篇:
库卡机器人内部重要机构的组成决定稳定性能的优越
上一篇:
库卡机器人倍率操作步骤方法——库卡机器人干货!!
©上海众平科技有限公司 版权所有 技术支持:
工博士
访问量:489657
网站首页
管理入口
联系热线:156 0178 5639 联系人:李经理 联系地址:上海黄浦区北京东路668号赛格电子市场G区五楼
技术和报价服务:星期一至星期六8:00-22:00
库卡机器人专营
——在线咨询——


 联系我们
联系我们